Optimizing Autonomous Sprayers for Washington Orchards
Industry partners: Robotics Plus Co, New Zealand
WSU Team: Dattatray Bhalekar, Kingsley Umani, Srikanth Gorthi, Gwen Hoheisel, Lav Khot
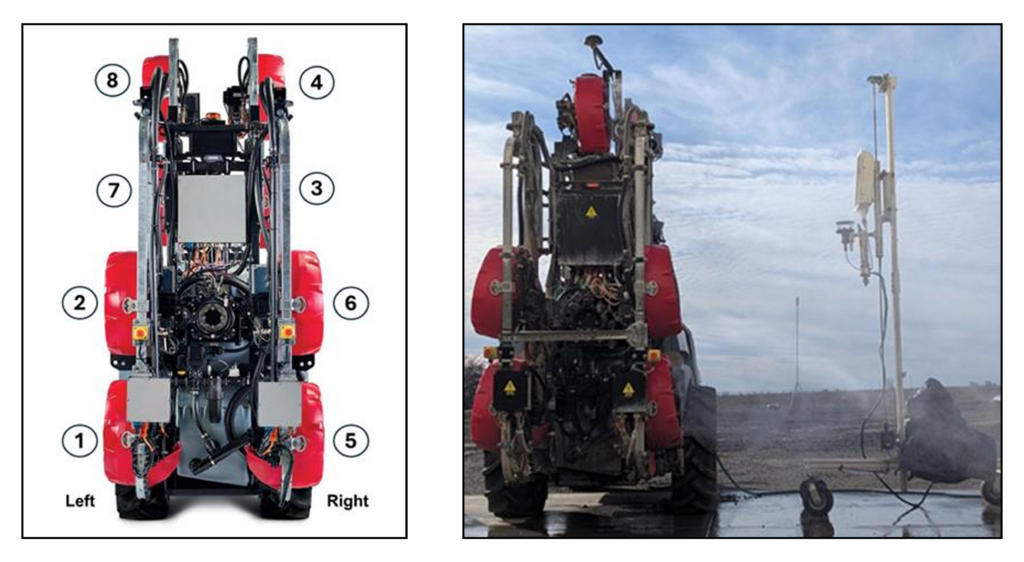
Conventional tractor‑mounted airblast sprayers are often poorly suited for pesticide applications in modern high‑density orchards. When not properly matched to tree size and canopy structure, these sprayers can produce excessive spray drift, uneven coverage within the canopy, and increased exposure for operators. These issues can reduce spray effectiveness, increase health and safety concerns, and may require additional applications, increasing both costs and the risk of exceeding pesticide residue limits. To overcome these challenges, the agricultural equipment industry is introducing autonomous and precision spraying technologies. One example is a single‑row, multi‑fan autonomous sprayer (Prospr, Robotics Plus Co., New Zealand) that is currently being evaluated and optimized at the testbed. This commercially available autonomous unmanned ground vehicle (UGV) is designed specifically for orchard spraying (Fig. 1).
The electric, all‑wheel‑drive sprayer navigates independently through orchards using RTK‑corrected GPS and 3D LiDAR sensors. Spray application is delivered through independently controlled upper and lower fan units, with up to ten nozzles mounted on each fan. This design allows airflow and spray volume to be adjusted to match tree height and canopy density. The ability to target different canopy zones is especially important in modern vertically structured orchard systems, where uniform spray coverage is difficult to achieve with conventional equipment.

New autonomous sprayer technology could allow a single operator to oversee multiple sprayers at once, helping reduce labor needs while improving worker safety. Before this equipment can be adopted by Washington growers, it must be tested and fine‑tuned for local orchard systems. To support this effort, a Washington State University research team evaluated a new autonomous sprayer in a commercial V‑trellised ‘EverCrisp’ apple orchard. The study, funded by the Washington Tree Fruit Research Commission, was aimed at determining how well this technology fits Washington tree fruit production and where improvements are needed.
Field Spray Trials
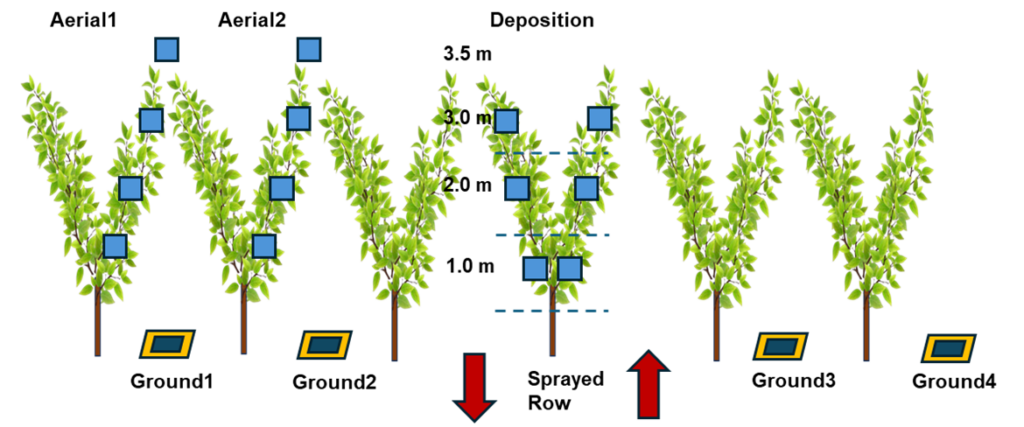
Airflow Optimization for Targeted Coverage. The WSU team used customized sonic anemometers set up at multiple canopy heights to quantify airflow penetration from the two sprayer settings (setting 1 – top: 2300 rpm, bottom: 2000 rpm at 5 mph, and setting 2 – top: 2100 rpm, bottom: 1900 rpm at 3 mph). The goal was to maintain air velocity below 5 mph through the canopy enough to carry droplets into the foliage without generating excessive drift.
Spray Deposition and Drift Performance. The study evaluated four combinations of application rate (80 vs. 100 GPA) and travel speed (3 vs. 5 mph) with fan speeds in the range 1900–2300 rpm. Spray deposition was measured across the top, middle, and bottom canopy zones using fluorescent tracer and sampling cards.
Results. The autonomous multi‑fan sprayer demonstrated strong on‑target performance while minimizing off‑target movement. Higher application rates resulted in significantly greater spray deposition across the canopy, regardless of travel speed. At the same time, the lower application rate (80 GPA) still provided relatively even coverage across canopy zones, indicating potential opportunities for chemical savings. Despite higher air velocities in the upper canopy, spray deposition was consistently lowest in the middle canopy.
Compared with previously tested conventional airblast sprayers, the autonomous sprayer produced substantially less drift. Airborne drift declined sharply within 12–24 ft downwind, and ground drift remained minimal at both 18 and 30 ft distances. Most off‑target movement occurred only within the adjacent row, with in‑canopy deposition 24–64 times greater than off‑target deposition.
Additional Air and Spray Patterns Assessment
In the above spray trials, a contradictory pattern was observed between air velocity and spray deposition in the middle canopy zone. Air velocity increased from the bottom to the top, while deposition was lowest in the middle zone, followed by the bottom and top canopy zones. As a result, the manufacturer conducted a thorough inspection of the machine’s hardware. In this sprayer unit, the output from each nozzle is typically adjusted using two electric proportional valve controls, one for each nozzle type. During the inspection, the manufacturer discovered that the electrical connections for these control valves were reversed. This misconfiguration led to incorrect application rates and caused non-uniform deposition across the canopy zones. The hardware issue was resolved; however, it necessitated further assessment of nozzle flow rates, air velocity, and spray delivery patterns to ensure the sprayer’s operational feasibility. After the issue was resolved, spray and air patterns were characterized using the Smart Spray Analytical System (SSAS, Fig. 3) built by WSU Precision Ag Laboratory.
The laboratory trials data revealed an average symmetry of 91% for air velocity and 84% for spray volume on either side. Additionally, an average uniformity of 57% and 48% was recorded for important sprayer attributes across the spray height. Overall, the assessment indicates that following the tune-up and optimization, the autonomous sprayer is suitable for efficient agrochemical application in modern Washington State orchards.
What This Means for Growers
Properly tuned and optimized autonomous sprayers offer several potential benefits for Washington State orchards:
- Efficient operation at higher travel speeds.
- More uniform spray coverage throughout the canopy.
- Reduced spray drift and environmental impact.
- Potential to lower chemical use with optimized spray rates.
- Reduced labor needs through autonomous operation.
What’s Next
Future work should focus on understanding the return on investment for growers and exploring added features such as weather‑responsive airflow adjustments, and real‑time sensing-driven variable‑rate application. These advances could further improve precision, efficiency, and adoption of autonomous spraying technology in Washington tree fruit orchards.
Publications
- Bhalekar, D. G., Umani, K., Gorthi, S., Hoheisel, G. A., & Khot, L. R. (2026). Air and Spray Pattern Characterization of Multi-Fan Autonomous Unmanned Ground Vehicle Sprayer Adapted for Modern Orchard Systems. Agronomy, 16(3), 344. https://doi.org/10.3390/agronomy16030344
- Hoheisel, G. A., Bhalekar, D. G., Gorthi, S., & Khot, L. R. (2025). Automated single-row multi-fan sprayer optimization for efficient spray application in modern apple orchards. In Precision agriculture’25 (pp. 292-298). Wageningen Academic. https://doi.org/10.1163/9789004725232_036